蒋蒋的学习笔记
插值
什么是插值
一种通过已知的、离散的数据点来估算未知位置数据点的过程或方法。
应用
- 图像缩放:
- 示例
- 对于一些固定分辨率的模型,比如RMBG2.0-图像去背景,它的分辨率是1024*1024,
- 图像预处理时:输入的任意尺寸图像resize成1024*1024大小后进行推理
- 推理完成后得到的1024*1024的alpha图层->resize成输入的图片大小
- 示例
- 特征图分辨率调整
- 示例
- FPN-特征金字塔
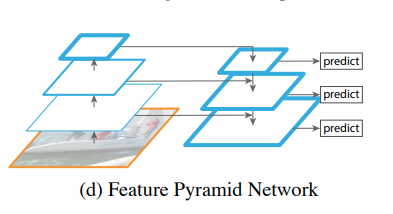
- 不同下采样率的特征图信息不一样,低采样率的特征图语义信息少但是位置信息准确,高采样率语义信息丰富但是位置信息粗糙,FPN将不同分辨率的特征图组合起来
- 640输入特征图,8/16/32的下采样->80/40/20的特征图。
- 不同维度特征图使用插值处理成相同维度
- FPN-特征金字塔
- 示例
- 数据重采样
- 示例
- 音频重采样
- ASR/TTS模型一般是固定的采样率,比如16k
- 输入的音频(如44.1k/22.05k)需要转换为模型使用的采样率
- 示例
aha库中插值的使用
Deepseek-OCR
- ImageEncoderViT-图像编码器中,添加训练的位置嵌入数据,位置嵌入的维度是固定的,但是因为deepseek-ocr配置里图像有多种尺寸512/640/1024/1280,所以需要将位置嵌入的维度处理成对应图像数据的维度,用到了线性插值和双三次插值
Paddle-OCR / Hunyuan-OCR
- 视觉嵌入过程中,添加训练的位置嵌入数据,位置嵌入的维度是固定的,patch处理时采用的自适应图像网格划分,不同的宽高划分后的网格宽高是不一样的,需要将位置嵌入的维度处理成对应的网格宽高,用到了双线性插值
RMBG2.0
- FPN结构中,将不同维度特征图使用插值处理成相同维度,再相加,用到了双线性插值
理解插值
问题
假设我们有一个一维张量包含10个数据点:
- [1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 9.0, 10.0]
- 坐标: 0 1 2 3 4 5 6 7 8 9
目标:通过插值得到5个数据点
坐标映射
插值的本质是回答一个问题:”输出的第i个数据,与输入数据的对应关系”
- 中心对齐:align_corners=false ```text 把数据点看作有面积的小方块,每个数据点代表其方块中心点的值 □────□────□────□────□────□────□────□────□────□ 0 1 2 3 4 5 6 7 8 9 –坐标 0.5 1.5 2.5 3.5 4.5 5.5 6.5 7.5 8.5 9.5 –中心点 每个方块宽度 = 1.0 总长度 = 10.0
输出(5个点): □────□────□────□────□ 0 1 2 3 4 –坐标 0.5 1.5 2.5 3.5 4.5 –中心点 总长度 = 5.0
缩放比例 scale = 10/5 = 2.0 输出点在输入中的位置:i_in = (i_out + 0.5) * scale - 0.5
* 角点对齐:align_corners=true
```text
把数据点看作"点",只关心数据中心点的位置
输入(10个点):
●────●────●────●────●────●────●────●────●────●
0 1 2 3 4 5 6 7 8 9
总长度 = 9.0
输出(5个点):
●────●────●────●────●
0 1 2 3 4
总长度 = 4.0
缩放比例 = 9/4 = 2.25
输出点在输入中的位置:i_in = i_out * scale
- 计算缩放因子
fn compute_scale(input_size: usize, output_size: usize, align_corners: bool) -> f32 { if align_corners && output_size > 1 { (input_size - 1) as f32 / (output_size - 1) as f32 } else { input_size as f32 / output_size as f32 } } - 计算输出点在输入中的位置
pub fn compute_1d_coords( input_size: usize, output_size: usize, align_corner: Option<bool>, ) -> Result<Vec<f32>> { if input_size == 0 { return Err(anyhow!("input_size must be > 0")); } if output_size == 0 { return Err(anyhow!("output_size must be > 0")); } if input_size == 1 { return Ok(vec![0f32; output_size]); } let align_corners = align_corner.unwrap_or(false); let scale = compute_scale(input_size, output_size, align_corners); if align_corners { Ok((0..output_size).map(|i| i as f32 * scale).collect()) } else { Ok((0..output_size) .map(|i| { let coord = (i as f32 + 0.5) * scale - 0.5; coord.clamp(0.0, (input_size - 1) as f32) }) .collect()) } }
最近邻插值
- 寻找坐标距离最近的数据作为它的值, 四舍五入
-
采用中心点对齐 ```rust // 1d:(bs, c, dim) for b in 0..bs { for c in 0..channels { for i in 0..target_size { let coord = if target_size == 1 { (orig_size - 1) as f32 / 2.0 } else { (i as f32 + 0.5) * (orig_size as f32 / target_size as f32) - 0.5 }; let nearest_idx = coord.round() as usize; let clamped_idx = nearest_idx.clamp(0, orig_size - 1);
output_data[b][c][i] = input_data[b][c][clamped_idx]; } } }
// 2d: (bs, c, h, w) -> (bs*c, h, w) for c in 0..dim0 { for i in 0..target_h { // 计算高度方向的最近邻坐标 let coord_h = if target_h == 1 { (orig_h - 1) as f32 / 2.0 } else { (i as f32 + 0.5) * (orig_h as f32 / target_h as f32) - 0.5 }; let nearest_h = coord_h.round() as usize; let clamped_h = nearest_h.clamp(0, orig_h - 1);
for j in 0..target_w {
// 计算宽度方向的最近邻坐标
let coord_w = if target_w == 1 {
(orig_w - 1) as f32 / 2.0
} else {
(j as f32 + 0.5) * (orig_w as f32 / target_w as f32) - 0.5
};
let nearest_w = coord_w.round() as usize;
let clamped_w = nearest_w.clamp(0, orig_w - 1);
output_data[c][i][j] = input_data[c][clamped_h][clamped_w];
}
} } ``` ### 线性插值 * align_corner可选 * 考虑左右两个点,使用权重来组合两个点的值 * 权重通过距离计算 ```text 当align_corner=false时 输入10个点 □────□────□────□────□────□────□────□────□────□ 0 1 2 3 4 5 6 7 8 9 --坐标 0.5 1.5 2.5 3.5 4.5 5.5 6.5 7.5 8.5 9.5 --中心点
输出(4个点): □────□────□────□ 0 1 2 3 –坐标 0.5 1.5 2.5 3.5 –中心点
* scale = 10 / 4 = 2.5
* 当 i_out=1时,i_in = (i_out + 0.5) * scale - 0.5 = 3.25
* 计算左右邻点:
* left_index = floor(3.25) = 3
* right_index = left_index + 1 = 4
* 计算权重
* dis_to_left = i_in - left_index = 0.25
* dis_to_right = right_index - i_in = 0.75
* 左邻点权重: weight_left = 1.0 - dis_to_left = 0.75
* 右邻点权重: weight_right = 1.0 - dis_to_right = 0.25
* 插值计算
* num_out = left_num * weight_left + right_num * weight_right
```rust
// 1d:(bs, c, dim)
let coords = compute_1d_coords(orig_size, target_size, align_corner)?;
for b in 0..bs {
for c in 0..channels {
for (i, &coord) in coords.iter().enumerate() {
let coord = coord.clamp(0.0, (orig_size - 1) as f32);
let x0 = coord.floor() as usize;
let x1 = (x0 + 1).min(orig_size - 1);
let weight = coord - x0 as f32;
let value0 = input_data[b][c][x0];
let value1 = input_data[b][c][x1];
output_data[b][c][i] = value0 * (1.0 - weight) + value1 * weight;
}
}
}
双线性插值
- align_corner可选
- 线性插值的扩展,考虑两个维度,共4个点
// 2d: (bs, c, h, w) -> (bs*c, h, w) for c in 0..dim0 { for (i, &coord_h) in coords_h.iter().enumerate() { let coord_h = coord_h.clamp(0.0, (input_height - 1) as f32); let y0 = coord_h.floor() as usize; let y1 = (y0 + 1).min(input_height - 1); let dy = coord_h - y0 as f32; for (j, &coord_w) in coords_w.iter().enumerate() { let coord_w = coord_w.clamp(0.0, (input_width - 1) as f32); let x0 = coord_w.floor() as usize; let x1 = (x0 + 1).min(input_width - 1); let dx = coord_w - x0 as f32; let q00 = input_data[c][y0][x0]; let q01 = input_data[c][y0][x1]; let q10 = input_data[c][y1][x0]; let q11 = input_data[c][y1][x1]; output_data[c][i][j] = q00 * (1.0 - dx) * (1.0 - dy) + q01 * dx * (1.0 - dy) + q10 * (1.0 - dx) * dy + q11 * dx * dy; } } } - 抗锯齿设置 antialias: bool
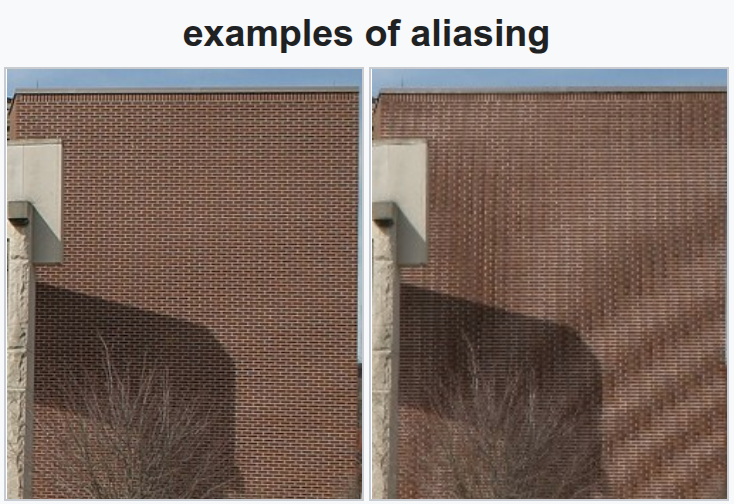
- 下采样时有效,antialias=True时,align_corners=False
- 根据scale,扩大考虑范围
fn antialias_filter(x: f32) -> f32 { let x = x.abs(); if x < 1.0 { 1.0 - x } else { 0.0 } } let support_size = scale_h.max(scale_w); // 2d: (bs, c, h, w) -> (bs*c, h, w) for c in 0..dim0 { for out_y in 0..target_height { let center_y = (out_y as f32 + 0.5) * scale_h - 0.5; let start_y = (center_y - support_size).max(0.0) as usize; let end_y = (center_y + support_size).min(input_height as f32 - 1.0) as usize; for out_x in 0..target_width { let center_x = (out_x as f32 + 0.5) * scale_w - 0.5; let start_x = (center_x - support_size).max(0.0) as usize; let end_x = (center_x + support_size).min(input_width as f32 - 1.0) as usize; let mut total_weight = 0.0; let mut weighted_sum = 0.0; for src_y in start_y..end_y + 1 { for src_x in start_x..end_x + 1 { let dist_x = (src_x as f32 - center_x).abs(); let dist_y = (src_y as f32 - center_y).abs(); let weight_x = antialias_filter(dist_x / scale_w); let weight_y = antialias_filter(dist_y / scale_h); let weight = weight_x * weight_y; weighted_sum += input_data[c][src_y][src_x] * weight; total_weight += weight; } } let result = if total_weight > 0.0 { weighted_sum / total_weight } else { let y = center_y.round().clamp(0.0, (input_height - 1) as f32) as usize; let x = center_x.round().clamp(0.0, (input_width - 1) as f32) as usize; input_data[c][y][x] }; output_data[c][out_y][out_x] = result; } } }
双三次插值
- align_corner可选
- 单方向取四个点,宽高两个维度,共16个点
- 权重计算方式

- 抗锯齿设置 antialias=false或上采样: a=-0.75 ```rust fn cubic_convolution1(x: f64, a: f64) -> f64 { ((a + 2.0) * x - (a + 3.0)) * x * x + 1.0 }
// 三次卷积函数2 fn cubic_convolution2(x: f64, a: f64) -> f64 { (((x - 5.0) * x + 8.0) * x - 4.0) * a }
fn get_cubic_coefficients(t: f64, a: f64) -> [f64; 4] { let coeff0 = cubic_convolution2(t + 1.0, a); let coeff1 = cubic_convolution1(t, a); let coeff2 = cubic_convolution1(1.0 - t, a); let coeff3 = cubic_convolution2(1.0 - t + 1.0, a);
[coeff0, coeff1, coeff2, coeff3] }
fn cubic_interp1d(x0: f32, x1: f32, x2: f32, x3: f32, t: f64, a: f64) -> f32 { let coeffs = get_cubic_coefficients(t, a); x0 * coeffs[0] as f32 + x1 * coeffs[1] as f32 + x2 * coeffs[2] as f32 + x3 * coeffs[3] as f32 } for c in 0..dim0 { for out_y in 0..target_height { let center_y = if align_corners { out_y as f32 * scale_h } else { (out_y as f32 + 0.5) * scale_h - 0.5 } .clamp(0.0, (input_height - 1) as f32); let in_y = center_y.floor() as isize; let t_y = center_y - in_y as f32; for out_x in 0..target_width { let center_x = if align_corners { out_x as f32 * scale_w } else { (out_x as f32 + 0.5) * scale_w - 0.5 } .clamp(0.0, (input_width - 1) as f32); let in_x: isize = center_x.floor() as isize; let t_x = center_x - in_x as f32; let mut coefficients = [0.0; 4]; for k in 0..4 { let row = (in_y - 1 + k as isize).clamp(0, input_height as isize - 1) as usize; let x_minus_1 = input_data[c][row][(in_x - 1).clamp(0, input_width as isize - 1) as usize]; let x_plus_0 = input_data[c][row][in_x.clamp(0, input_width as isize - 1) as usize]; let x_plus_1 = input_data[c][row][(in_x + 1).clamp(0, input_width as isize - 1) as usize]; let x_plus_2 = input_data[c][row][(in_x + 2).clamp(0, input_width as isize - 1) as usize];
coefficients[k] =
cubic_interp1d(x_minus_1, x_plus_0, x_plus_1, x_plus_2, t_x as f64, -0.75);
}
output_data[c][out_y][out_x] = cubic_interp1d(
coefficients[0],
coefficients[1],
coefficients[2],
coefficients[3],
t_y as f64,
-0.75,
);
}
} } ``` * 抗锯齿设置 antialias = true且下采样时,a = -0.5 * 根据scale, 扩大考虑范围 ```rust fn bicubic_filter(x: f32, a: f32) -> f32 {
let x = x.abs();
if x < 1.0 {
((a + 2.0) * x - (a + 3.0)) * x * x + 1.0
} else if x < 2.0 {
(((x - 5.0) * x + 8.0) * x - 4.0) * a
} else {
0.0
} }
let scale = scale_h.max(scale_w); let support_size = if scale >= 1.0 { (2.0 * scale).ceil() } else { 2.0 }; for c in 0..dim0 { for out_y in 0..target_height { let center_y = (out_y as f32 + 0.5) * scale_h - 0.5; let start_y = (center_y - support_size).ceil() as isize; let end_y = (center_y + support_size).floor() as isize; for out_x in 0..target_width { let center_x = (out_x as f32 + 0.5) * scale_w - 0.5; let start_x = (center_x - support_size).ceil() as isize; let end_x = (center_x + support_size).floor() as isize; let mut sum = 0.0; let mut weight_sum = 0.0; for iy in start_y..end_y + 1 { for ix in start_x..end_x + 1 { if iy >= 0 && iy < input_height as isize && ix >= 0 && ix < input_width as isize { let dx = (ix as f32 - center_x).abs(); let dy = (iy as f32 - center_y).abs(); let wx = bicubic_filter(dx / scale_w.max(1.0), -0.5); let wy = bicubic_filter(dy / scale_h.max(1.0), -0.5); let weight = wx * wy; sum += input_data[c][iy as usize][ix as usize] * weight; weight_sum += weight; } } } if weight_sum > 0.0 { output_data[c][out_y][out_x] = sum / weight_sum; } else { let y = center_y.round().clamp(0.0, (input_height - 1) as f32) as usize; let x = center_x.round().clamp(0.0, (input_width - 1) as f32) as usize; output_data[c][out_y][out_x] = input_data[c][y][x]; } } } } ```
完整代码地址: https://github.com/jhqxxx/aha/blob/main/src/utils/interpolate.rs